

The mystery of the moment acting on the sole during bipedal walking
Naomichi Ogihara
(Professor, Department of Biological Sciences)
People can easily walk and run on two legs on any surface ranging from rugged hillsides to fluffy sand. However, when we try to engineer a robot capable of the same, we realize this is an extremely difficult problem. How did humans evolve to walk on two legs without falling over in an ever-changing environment?
Walking is a mechanical phenomenon in which the body is moved from one position in space to another by controlling the reaction forces that the ground exerts on the sole. Therefore, the success or failure of bipedal walking depends on the proper control of the reaction forces (ground reaction forces). To clarify the dynamical and control principles behind the generation of stable bipedal locomotion, research has long been conducted in engineering, medicine, and biology, analyzing the ground reaction forces during human locomotion. Although a vast amount of knowledge has accumulated during the long history of bipedalism research, the moment acting on the sole has been mostly overlooked. When the sole gets in contact with the ground during walking, the ground reaction forces distribute over the entire sole. The horizontal components of these forces act on the sole, generating a moment (the force that causes rotation) around the vertical axis (Fig. a). However, it has been widely believed that the moment generated is negligibly small, and no one attempted to clarify its effect on the dynamics and control of bipedal walking.
This moment is generated by the distribution of horizontal ground reaction forces acting on the sole during bipedal walking. Therefore, to reduce the generated moment, the sole should make the least amount of contact possible with the floor during walking. To achieve this, our research group created "point-contact shoes," running shoes with metal spheres attached to the soles. We then compared walking in them with walking in normal shoes (Fig. b). The chest and pelvis rotate in opposite directions around the vertical axis of the body under normal conditions. In the case of point-contact shoes, however, we found that they rotate in the same direction and with a larger amplitude. The opposing rotational directions of the chest and pelvis improve walking efficiency by canceling the angular momentum between the upper and lower body segments. The greater rotation of the chest and pelvis also indicates that the gait is relatively unstable. Therefore, it is clear that the moment acting on the sole plays a crucial role in producing a stable and efficient bipedal gait. However, it was possible to achieve a normal gait, the chest and pelvis rotating in opposite directions and with a small amplitude, even in point-contact shoes when arm swinging was present. These findings indicate that the generated moment contributes to the stabilization and efficiency of bipedal walking, especially when there is no arm swing to control trunk rotation, such as when carrying objects. Although the reason why our ancestors evolved to walk on two legs is still unclear, one of the most promising hypotheses is the provisioning hypothesis. This theory proposes that bipedal walking led to the development of upright bipedal walking because of selection pressure on males that carried food in their hands to provide for their partners and offspring. Our results strongly suggest that the evolution of human bipedal locomotion may have been an adaptation for transport, especially food transport, and corroborate the provisioning hypothesis. Our lab strives to further contribute to solving the mystery of the origin and evolution of human upright posture and bipedalism.
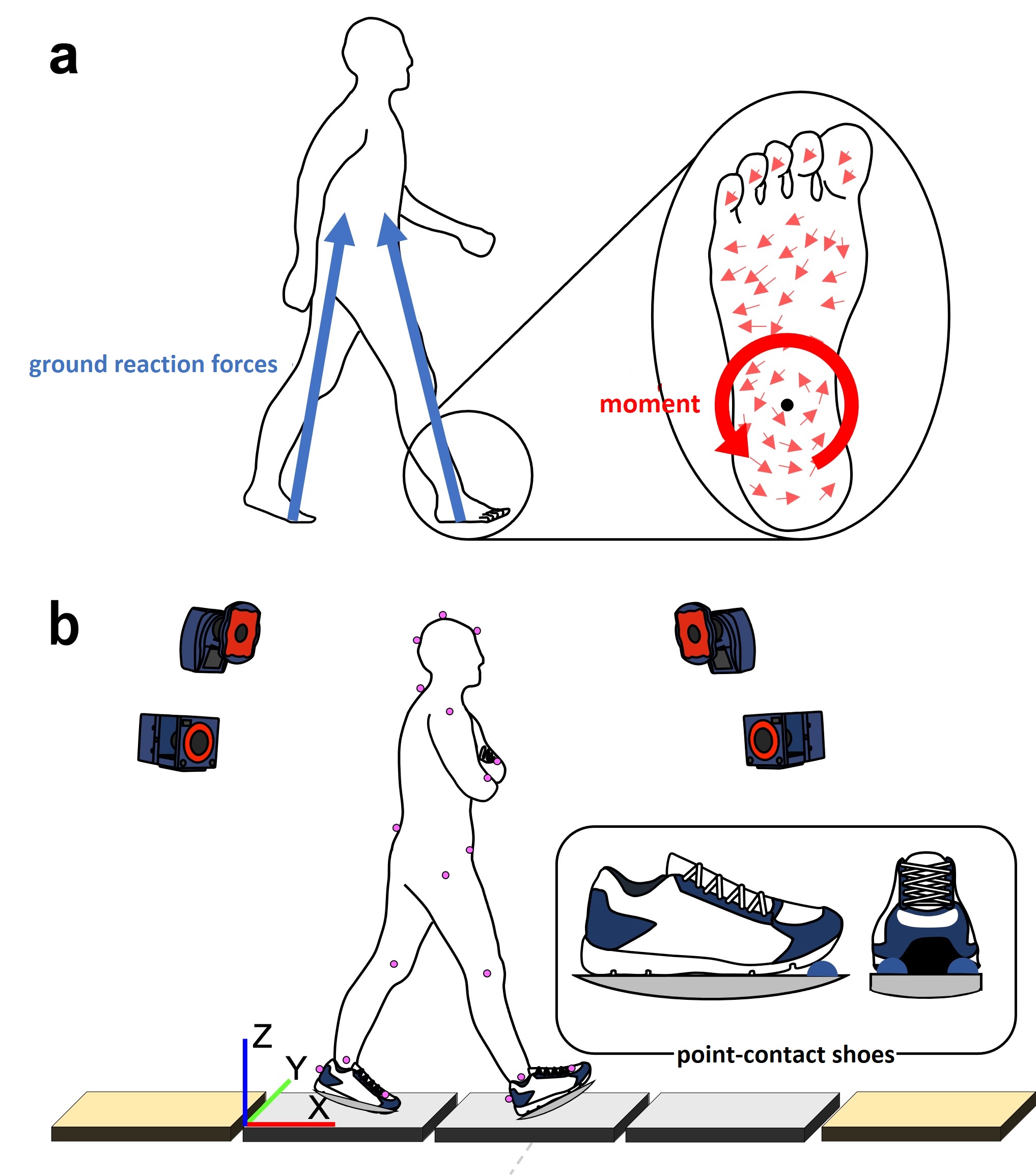
Figure: 1.Ground reaction forces and vertical moment applied to the sole during bipedal walking
2.A bipedal walking experiment using “point-contact shoes”, a pair of running shoes with aluminum spheres (1000 mm in diameter) attached to the shoe sole. The movement of each body part was measured by recording the movements of reflective markers attached to the body with motion capture cameras.
References
Negishi, T., Ogihara, N. Functional significance of vertical free moment for generation of human bipedal walking. Sci. Rep. 13, 6894 (2023).
― This article is from the "Mysteries in Science" series in The Rigakubu News ―