
DATE2023.01.31 #Press Releases
New method for complex deformation of entangled chain-like molecular machines
Disclaimer: machine translated by DeepL which may contain errors.
--A new switch that utilizes the shape of a "snug-fitting" molecule.
Graduate School of Arts and Sciences, The University of Tokyo
Graduate School of Science, The University of Tokyo
Summary of presentation
Professor Jun Terao, Assistant Professor Hiroshi Masai, Graduate School of Arts and Sciences, The University of Tokyo, and graduate student Yuki Oka have developed a new methodology for controlling the motility of catenanes, which are ring-shaped molecules intertwined with each other. Conventionally, the most common method for controlling catenane motility has been to use metal ions. However, the motility of catenan motility is limited to simple control using only metal ions with simple geometries. In this study, the research group showed that by designing molecules that "fit snugly" between the rings that make up the catenan, each ring changes its motility in accordance with the shape of the molecule, enabling more complex control of the catenan's motility than was previously possible. This new method of controlling catenans is expected to be applied to molecular machines with complex motion and sensor materials that recognize molecular shapes in the future.
The research results were published in the online edition of Angewandte Chemie International Edition, a journal of the German Graduate School, on January 26, 2023 (German Standard Time).
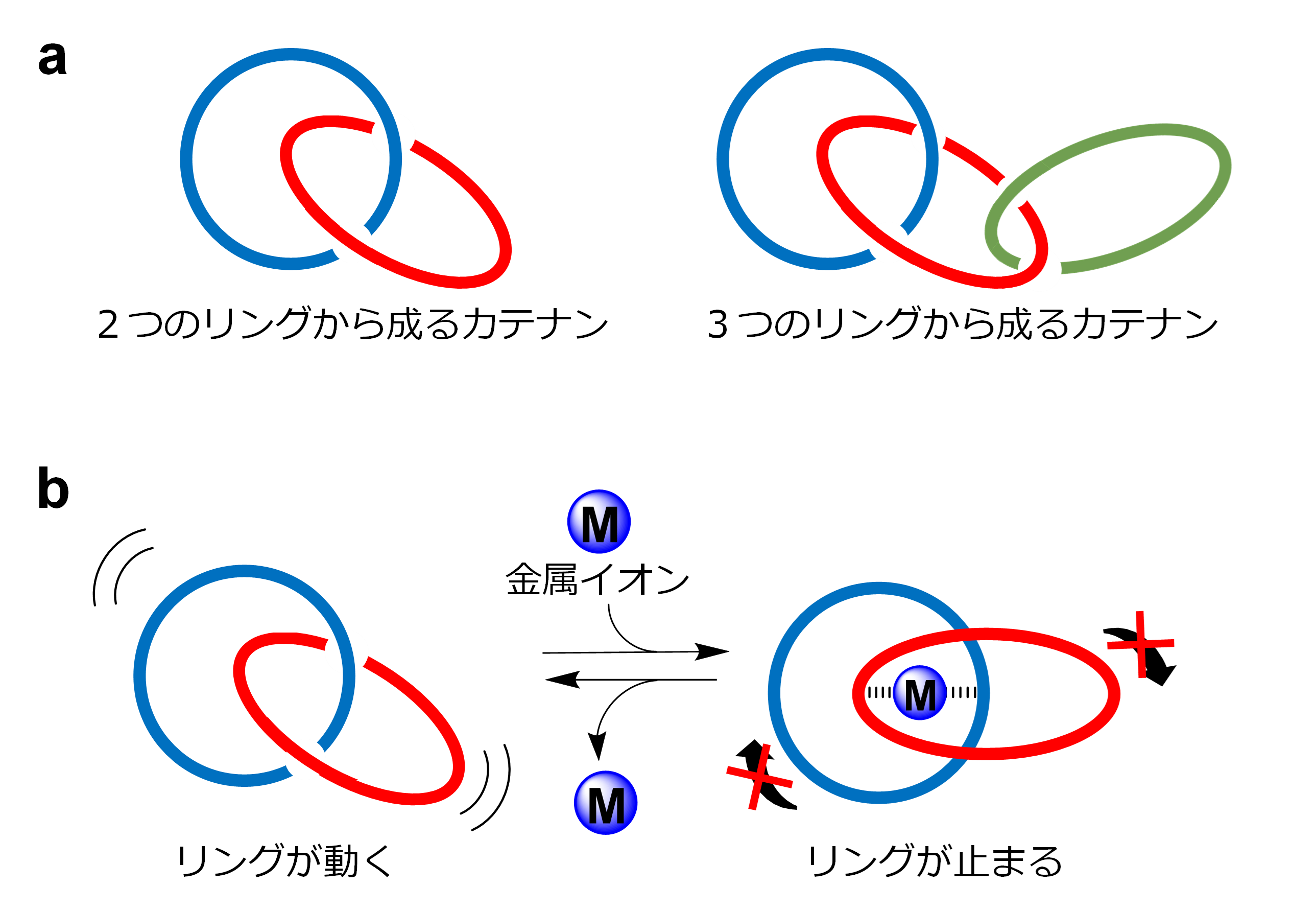
Figure: (a) Catenane structure and (b) Schematic diagram of ring motility control by external stimuli (metal ions)
For more information, please visit the website of the Graduate School of Arts and Sciences, The University of Tokyo.